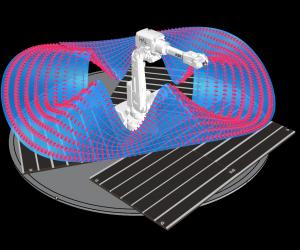
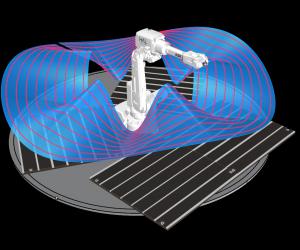
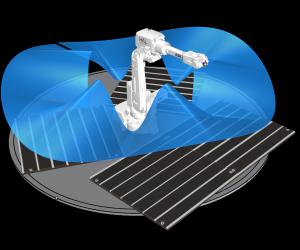
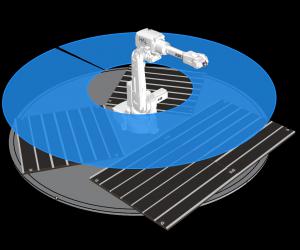
Industrial Robotic Arm Toolpathing with HAL for Grasshopper
Want to Contribute?
Want to be an author? Drop us a line here we'd love to have you.
Already have a video you'd like to post? Send us a link and we'll get you going.
:)

Login for more Features!
Want to be an author? Drop us a line here we'd love to have you.
Already have a video you'd like to post? Send us a link and we'll get you going.
:)